ПхотоРобот Роботски грамофон и роботска рука V8 Упутство за употребу

Следећа документација служи као упутство за употребу за
Ваћно: Почетна инсталација
Нота: Увек погледајте
Роботски грамофон са роботском руком V8 проширење
Честитам и хвала вам што сте купили
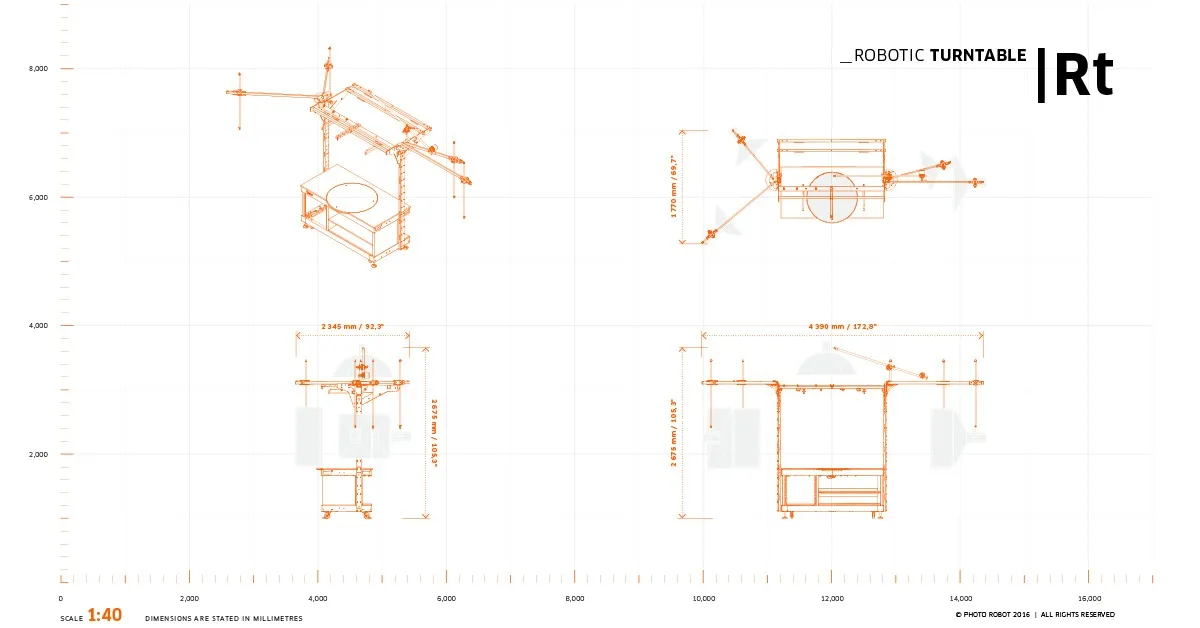
1 . Радна станица Опис - Роботски грамофон и рука V8

Кључне карактеристике роботског грамофона и роботске руке у комбинацији укључују:
- Тешке услове рада грамофон са отпорношћу на хабање и високе носивости од 200 килограма.
- Грамофон плоча са препустом преко ивице стола за фотографије под нултим углом.
- Ласерски вођено позиционирање објеката да увек пронађу апсолутни центар ротације.
- Интегрисани носачи за осветљење и каблирање кроз унутрашњост грамофона оквира.
- Даљински снимање камера у синхронизацији са аутоматским ротацијом грамофона.
- Глатко кретање камере дуж прецизне путање без осцилација руке камере.
- Прикључна станица за лакши транспорт и подешавање роботске руке.
1.1 . Студио Интеграција - Роботски грамофон и рука V8
У оквиру студија, роботски грамофон подржава фотографисање малих, али тешких предмета, док роботска рука ВКСНУМКС има велики опсег монтаже. Ово омогућава свестраност у избору глава статива и камера приликом коришћења радне станице. У међувремену, роботска рука има робусну конструкцију, прецизно кретање и две величине руке камере за снимање објеката различитих величина. Могуће је усмерити роботску руку камере на даљину и синхронизовано са грамофоном и студијским светлима како би се у потпуности аутоматизовало снимање слике и произвело високо реалистичне 3D фотографије.
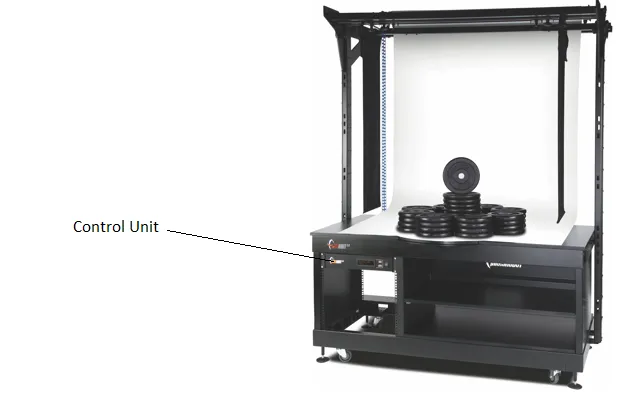
1 .2 . Контролна јединица - Роботски грамофон и рука V8
Једна од главних компоненти роботског грамофона са роботском руком V8 експанзије је контролна јединица. Контролна јединица је саставни део система јер се напаја и контролише све кретање и роботског грамофона и руке V8.
Контролна јединица није физички део роботске руке. Уместо тога, контролна јединица је физички инсталиран у роботском грамофон ако су оба уређаја испоручена заједно. Контролна јединица је смештена у наменски ХД сталак у горњем левом предњем делу тела роботске грамофон машине. У међувремену, Роботиц Арм V8 пристаје заједно са роботском руком када је у употреби.

1 .3 . Преглед проширења роботске руке V8

Кључне компоненте роботске руке ВКСНУМКС укључују:
- Контролна јединица (посебан уређај за контролу руке и компатибилан грамофон)
- Дршка за монтажу камере (једна кратка, једна дугачка или обоје)
- Увлачиви точкови на бази машине за мобилност.&нбсп;
- Прикључна станица за брзо подешавање са компатибилним грамофонима и уређајима.
Поред тога, рука камере не осцилира, тако да се камера увек креће дуж прецизне путање. Ту је и велики опсег монтаже за флексибилност у избору глава статива и камера, као и функције за транспорт и подешавање без напора.
Нота: Погледајте Роботиц Арм V8 Упутство за употребу за техничка упутства о монтажи, раду и првој употреби уређаја.
2 . Пре прве употребе ПхотоРобот
Ако
Нота: Погледајте
Генерално , постоје следећи основни оперативни захтеви.
- Контролна јединица мора да се повеже на локалну мрежу.
- Рачунар је неопходан за покретање сервисног ГУИ или софтвера оператера који се зове _Цонтролс.
- Рачунар мора да се повеже преко исте мреже као и контролна јединица.
- На мрежи мора постојати функционална интернет конекција.

Након повезивања
Ваћно : Ако подешавање контролне јединице није у складу са тим, прво га подесите. Да бисте то урадили, пронађите ручни селектор напона на задњој страни контролне јединице и повежите контролну јединицу на мрежу преко етхернет кабла помоћу RJ45 конектора.

Затим , обезбедите следеће захтеве за конфигурацију мреже за рад роботског грамофона са Арм V8 су испуњени.
- ДХЦП сервер у мрежи је обавезан.
- ТЦП портови 7777, 7778 комуникација мора бити дозвољена.
- УДП емитује на порту 6666 мора бити дозвољено.
- Интернет конекција је обавезна.
- *.
пхоторобот .цом приступ мора бити дозвољен. - ас -униробот .азуреwебситес .нет приступ мора бити дозвољен.
- Жичана веза
ПхотоРобот на ЛАН се препоручује. - Потврдите подешавање позивајући се
ПхотоРобот Предуслове за умрежавање по потреби. - Прикључите утикач у утичницу.
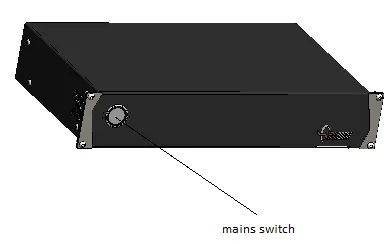
На крају, притисните мрежни прекидач на контролној јединици. Када се статус промени, светло ће се променити од треперења до сталног светла, сигнализирајући да је контролна јединица спремна за рад.
2 .1 . Пронађи ИП адресу ПхотоРобот на ЛАН-у
Nakon pravilne konfiguracije mreže, potrebno je pretražiti i identifikovati IP adresu PhotoRobot-a na LAN-u. Da bi se to uradilo, aplikacija PhotoRobot Locator je integrisana direktno u CAPP za lakše pretraživanje i identifikaciju kontrolnih jedinica na mreži. Uverite se da koristite najnoviju verziju CAPP-a za pristup ovoj funkciji.
Zatim, da biste identifikovali robota na mreži direktno unutar CAPP-a, otvorite lokalnu verziju CAPP-a, idite na Podešavanja i kliknite na Roboti / Kontrolne jedinice.

Meni Roboti / Kontrolne jedinice prikazuje kolone sa Nazivom, Mrežom, Jedinicom, Verzija, Otkriveno i Identifikuj za svakog robota. Ako je tačka levo od imena robota zelena, on je onlajn. Klikom na polje robota otvoriće se veb interfejs robota. Ovo će takođe učiniti da LED svetlo na kontrolnoj jedinici robota treperi zeleno radi lakše identifikacije.
Ako je kupcu potrebno eksterno preuzimanje aplikacije, PhotoRobot Locator je takođe dostupan za preuzimanje za iOS unutar PhotoRobot Preuzimanja naloga.

Napomena: Android verzija PhotoRobot Locator-a je ukinuta.
Alternativno, postoji FRFind komandna linija za MacOS ili Windows za pretraživanje mreže i identifikaciju PhotoRobot kontrolnih jedinica. Linkove za preuzimanje FRfind-a takođe možete pronaći putem stranice PhotoRobot Account Downloads.
Затим , након што пронађете
2.2 . Основно тестирање роботског грамофона и руке V8
Са отвореним сервисним ГУИ-ом, користите једноставне контроле корисничког интерфејса за прво укључивање мотора машина. Затим користите стрелице лево или десно поред дугмета за паузу да бисте окренули платформу под било којим кутом, а затим тестирајте кретање роботске руке. Ако се уређаји помере у жељеном углу, радна станица је спремна за редован рад.

- Укључите моторе (стрелица 1), покушајте да ротирате (стрелица 2).
- Ако робот прати упутства за кретање, ваш
ПхотоРобот уређај је спреман за редован рад.
3 . ПхотоРобот _Цонтролс Преглед софтвера
Даљински управљач над роботским грамофоном са роботском руком V8 експанзијском радном станицом, укључујући све роботе, камере и светла је преко софтвера

Важно :
За детаљна упутства и подршку о инсталацији и коришћењу софтвера
4 . Информативне етикете
4 .1 . Преглед симбола

4 .2 . Машинске и компонентне етикете
За информативне налепнице за одређене машине и компоненте, погледајте одељак Информације Етикете (3.1.) из


ПоверСхот&нбсп;Ребел&нбсп;серија


ПоверСхот&нбсп;ДСЛР&нбсп;серија


ЕОС &нбсп;М &нбсп;серија без&нбсп;огледала


ПоверСхот серија


Изблиза /&нбсп;Ручни

Цанон ЕОС Ребел серија нуди ДСЛР фотоапарате прилагођене почетницима са солидним квалитетом слике, интуитивним контролама и разноврсним функцијама. Идеални за љубитеље фотографије, ове камере пружају поуздан аутофокус, екране осетљиве на додир под различитим угловима и Фулл ХД или 4K видео снимање.
Везу
Резолуција (МП)
Резолуцију
Цанон ЕОС ДСЛР серија пружа висококвалитетне слике, брз аутофокус и свестраност, што га чини идеалним за фотографију и видео продукцију.
Везу
Резолуција (МП)
Резолуцију
Цанон ЕОС М серија без огледала комбинује компактан дизајн са перформансама сличним ДСЛР-у. Са изменљивим објективима, брзим аутофокусом и висококвалитетним сензорима слике, ове камере су одличне за путнике и креаторе садржаја који траже преносивост без жртвовања квалитета слике.
Везу
Резолуција (МП)
Резолуцију
Цанон ПоверСхот серија нуди компактне, усер-фриендли камере за повремене стрелце и ентузијасте. Са моделима у распону од једноставних поинт-анд-схоотс до напредних камера за зумирање, они пружају практичност, солидан квалитет слике и функције као што су стабилизација слике и 4K видео.
Везу
Резолуција (МП)
Резолуцију
Цанон крупни и ручни фотоапарати дизајнирани су за детаљну фотографију и видео запис изблиза. Компактни и једноставни за коришћење, нуде прецизан фокус, снимање високе резолуције и свестране макро могућности - савршене за влогирање, фотографију производа и креативне крупне планове.


